webpage: [link]
Reference paper: The HRC model set for human-robot collaboration research [PDF] [BIB]
Authors: Sofya Zeylikman, Sarah Widder, Alessandro Roncone, Olivier Mangin, and Brian Scassellati
Submission: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018), Madrid, Spain, October 1-5, 2018
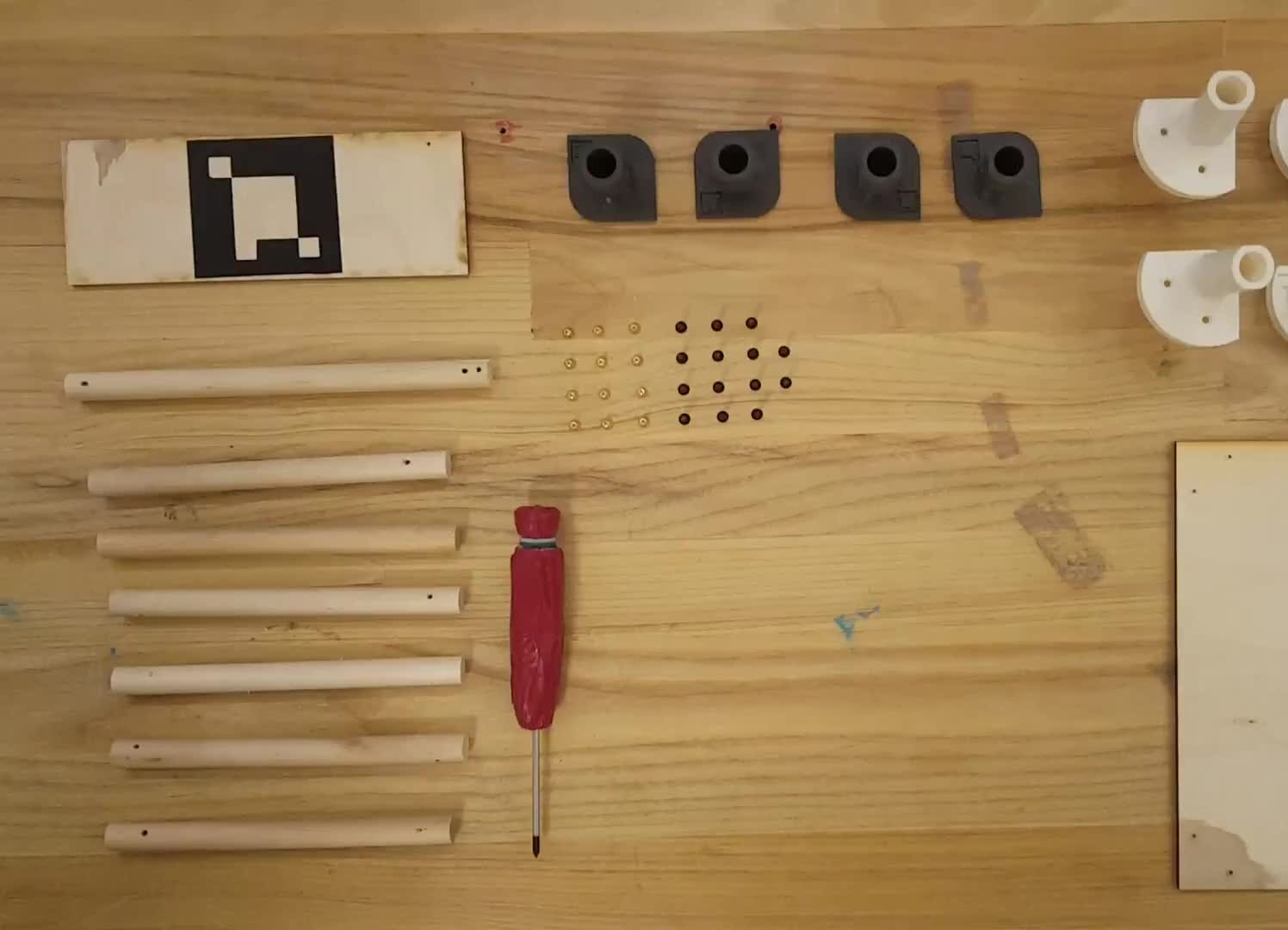
The Human-Robot Collaboration (HRC) model set is intended to ease the design of human-robot collaboration experiments. It targets scenarios like the collaborative assembly of furniture, and consists of a combination of standard components and custom designs, that are:
- A series of eight 3D printed brackets
- Dowels
- Plywood
- Fasteners (Screws)
The model set aims at reducing the amount of work required to set up and reproduce HRC experiments. It is designed to be modular, extendable, and easy to distribute. All the content of this repository is distributed under the Creative Commons attribution-sharealike 4.0 international public license (CC-by-sa).
3D Printed Brackets
The 3D Printed Brackets were designed with three main criteria in mind : re-use, replicability, and modularity.
The .stl files and the SolidWorks files can be found in the Bracket STL Files and Bracket SolidWorks Files sub-folders respectively.
For more information on how to customize the brackets, please visit here.
Configurations
We present four prototypical objects built using different configurations of the hardware mentioned above.
Our designs range from the most simple, the Table configuration, to quite complex, the Console configuration.
3D Printing
Each bracket is modeled in SolidWorks and then printed on a Dimension Elite FDM printer using ABS+ plastic.
Here are some guidelines to use when printing out a file using some common 3D printers.